SF5181 ZKSDInterpolator
Overview
This product is a high-performance motion control tool that provides efficient and precise XYZ three-axis continuous interpolation and obstacle avoidance functions, aiming to optimize path planning and improve the safety of motion control. The library is suitable for multi-axis motion control, especially when performing precision tasks in complex environments, as it can effectively avoid collisions and ensure optimal paths.
The library implements multi-segment continuous trajectory interpolation from the starting position to the target position, supporting the setting of parameters such as speed, acceleration, and deceleration for each segment of interpolation. If parameters are not explicitly set, default values will be used for interpolation. It offers T-shaped and S-shaped acceleration/deceleration options and flexible transition curve types to ensure smoothness and accuracy of motion.
The obstacle avoidance function is applicable to robot devices in the XYZ Cartesian coordinate system. The size and position of obstacles are defined through a virtual obstacle model. The library supports setting safety margins and the height of the upper and lower surfaces of obstacles. The robot adjusts the Z-axis movement according to the set height and distance to ensure avoiding interference from obstacles and reaching the target position safely.
The following table outlines each product component:
| Product Component | Description |
|---|---|
| FB_InterpolatorXYZ | XYZ three-axis continuous interpolation |
| FB_PickBond | Obstacle avoidance function |
Installation and Uninstallation
Installation Requirements
This section describes the minimum requirements for the engineering and/or runtime system.
1. Hardware Requirements
Devices supporting the MetaFacture platform (PLC or embedded systems).
2. Software Requirements
MetaFacture development environment installed.
Operating system support: MetaOS or other compatible platforms.
Relevant library or module dependencies must be available (such as basic I/O libraries).
Installation Process
Depending on the version of ZDSKInterpolator and the operating system used, the product can be installed in different ways, which are described in detail below.
Open the engineering project in MetaFacture.
Select "Tools" -> "Library Storage" from the menu.

Click Install, and open the ZDSKInterpolator library file.
Click "Add Library".

Select ZDSKInterpolator and click Confirm.
Update Installation
1. Overlay Installation
Download the latest version of the ZDSKInterpolator library file.
Open the MetaFacture project, delete the old version of the library in the "Library Manager", and import the new version of the library file.
Save the project and recompile.
2. Version Compatibility Verification
Check whether the new version is compatible with the existing project (e.g., check parameters and interfaces).
Adjust possible differences between the old and new versions according to the documentation.
Uninstallation Process
1. Uninstall via Library Manager
Open the MetaFacture project and enter the "Library Manager".
Select the ZDSKInterpolator library and click "Delete Library" to uninstall the library file.
- Clean Up Project Dependencies
Open the engineering project, check and remove all function blocks or interfaces that use the ZDSKInterpolator library.
Ensure that the project compiles without errors after recompilation.
XYZ Three-Axis Continuous Interpolation Function
Taking the X, Y, and Z axis positions at the start of the function block as the starting point, and given the coordinates of subsequent multi-segment continuous trajectories, it realizes three-axis continuous interpolation from the start point to the end point.
Speed, acceleration, deceleration, and jerk for each interpolation segment can be set separately in the command structure array. If not set or set to 0, the corresponding default parameters in the default parameter structure will be used.
T-shaped/S-shaped acceleration and deceleration, and transition curve types between straight lines are optional, and corresponding parameters can be set in the default parameter structure.
Usage Requirements
| Development Environment | Target Platform | Required PLC Library |
|---|---|---|
| MetaFacture | PC | ZKSDInterpolator |
Obstacle Avoidance Function
The obstacle avoidance function is applicable to XYZ Cartesian coordinate robot devices.
Pickbond only allows a single cuboid obstacle from the pick point to the bond point, with its length, width, and height parallel to the XYZ coordinate axes.
The pick point and bond point are set according to the positions read by the actual equipment servo.
Pickbond considers that the obstacle is infinitely long along the positive and negative directions of the X-axis, and infinitely long along the negative direction of the Z-axis, meaning that increasing the Z-axis value can move away from the obstacle.
Set a virtual obstacle with two corner positions. The three coordinate values of the negative corner point must be respectively smaller than those of the positive corner point to determine the position and size of the obstacle.
The corner coordinate values are compared based on the positions read by the actual equipment servo. The smallest value is taken as the negative corner point, and the largest value as the positive corner point.
The upper surface height of the obstacle must be set higher than the Z heights of the pick point and bond point.
The obstacle should cover the key parts, as shown in the figure.
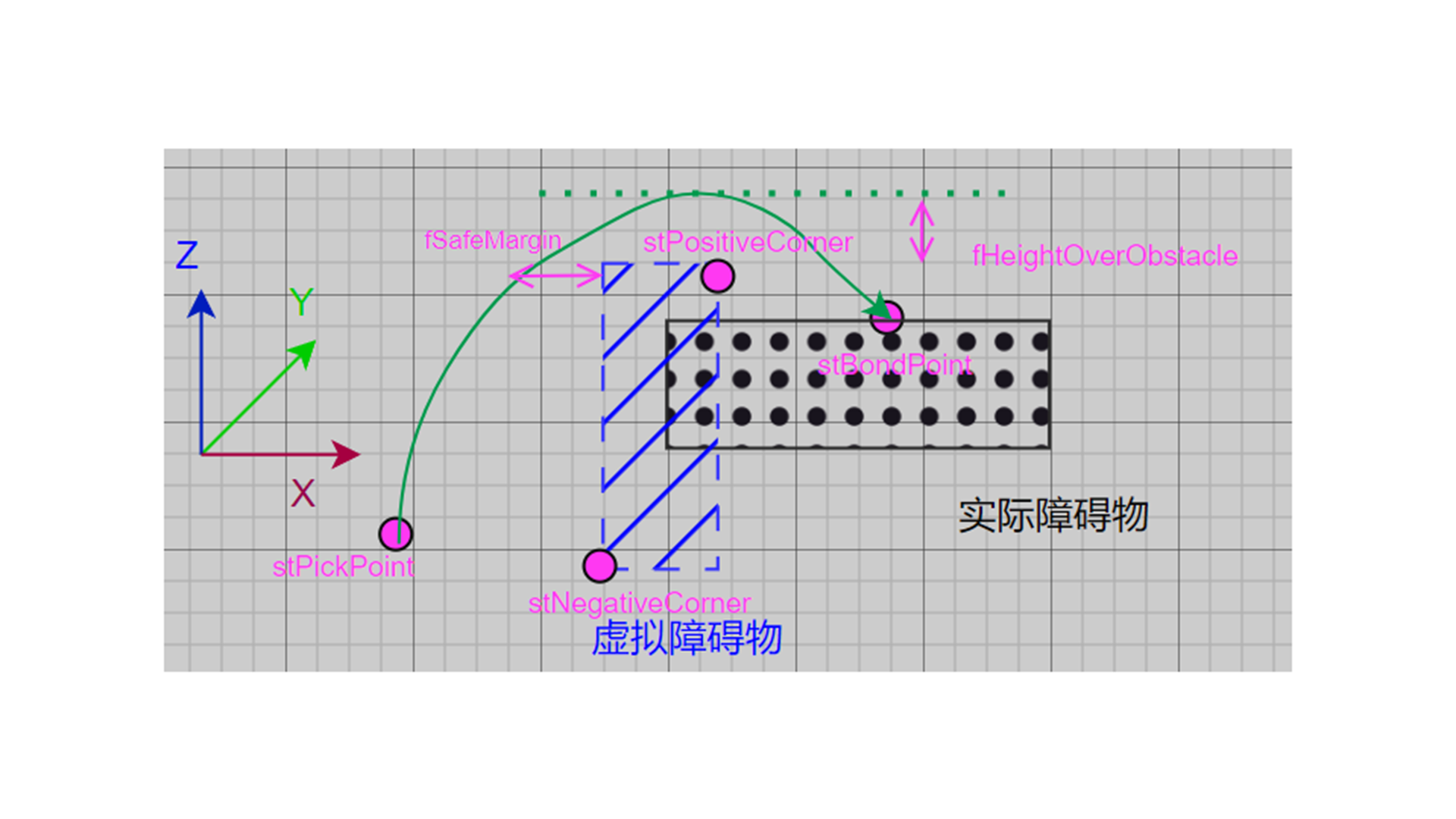
The height fHeightOverObstacle specifies the height of the Z-axis exceeding the upper surface of the obstacle. The Z-axis moves upward to this height, stops, and then moves in the reverse direction.
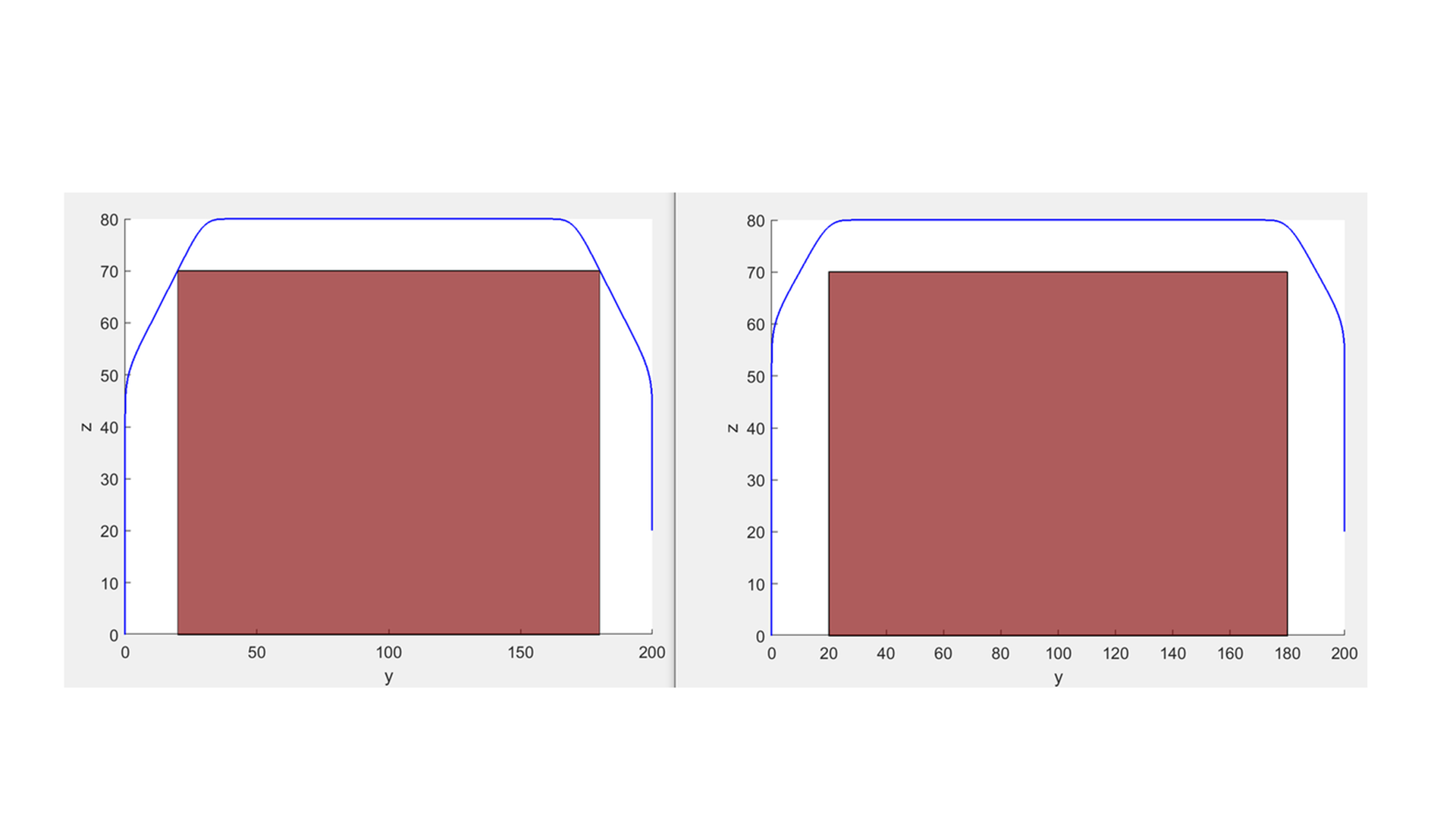
Under other allowable conditions, the optimal time path will be very close to the edge of the obstacle, as shown in the left figure below. The variable safe_margin is used to keep away from the obstacle, as shown in the right figure below.
After the movement from the pick point, the thimble axis and Z-axis first move synchronously for a small distance. After the synchronous movement ends, the Z-axis position will not exceed the obstacle's upper surface plus fHeightOverObstacle. Then the thimble axis decelerates to zero and returns to the set starting point. The XYZ axes move around the obstacle to the bond point.
Usage Requirements
| Development Environment | Target Platform | Required PLC Library |
|---|---|---|
| MetaFacture | PC | ZKSDInterpolator |